
テオヤンセン機構
6,596
|
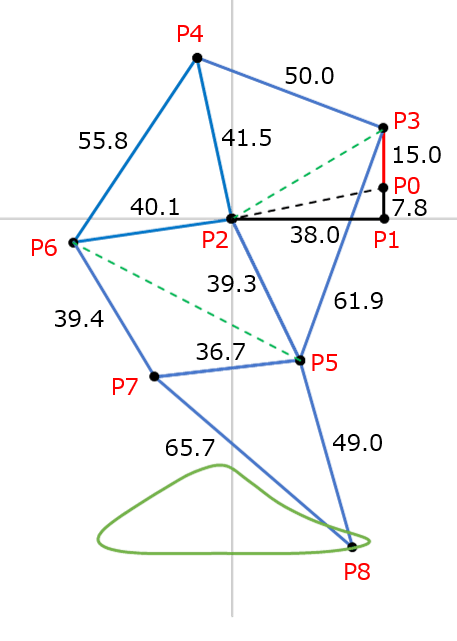
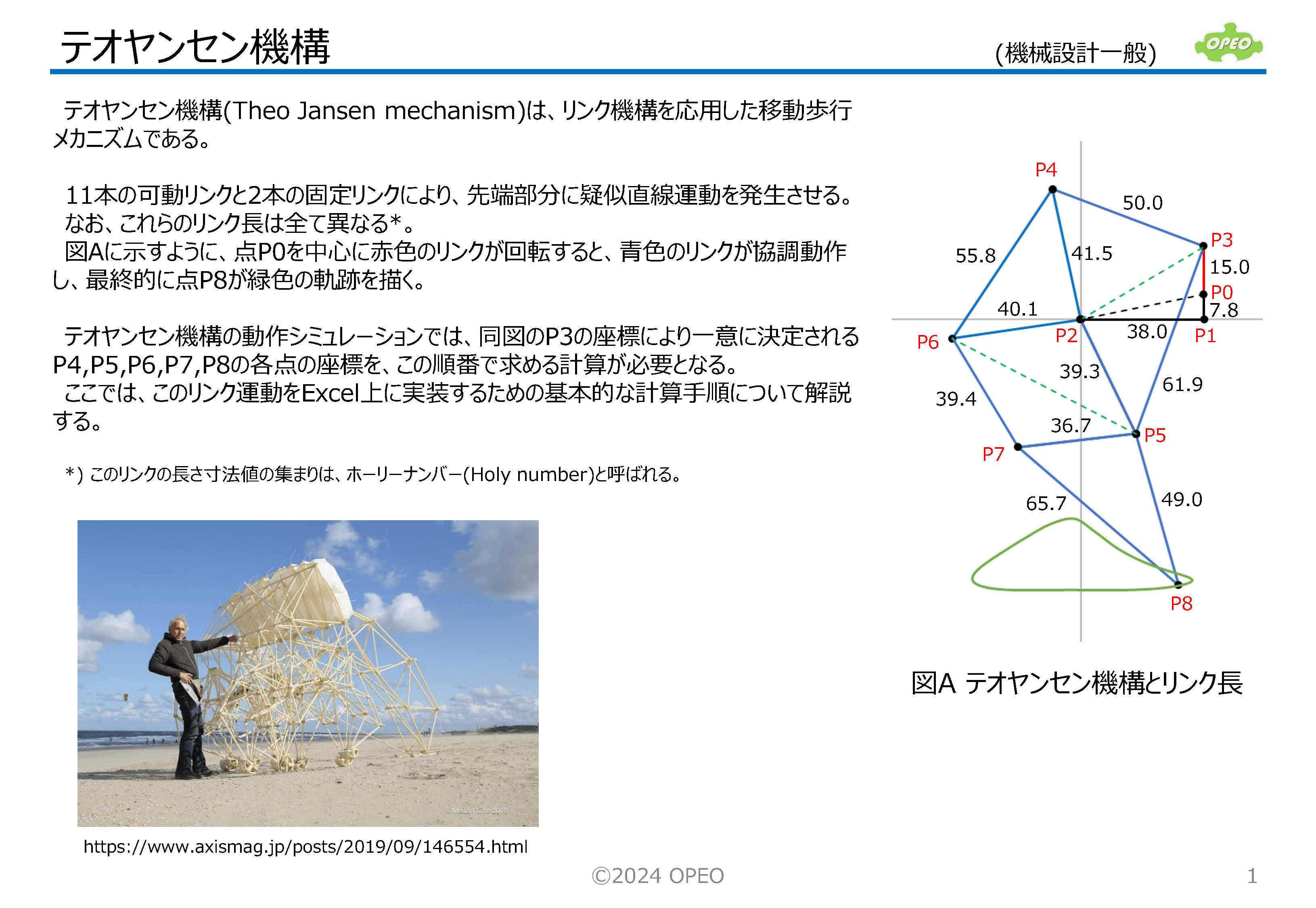
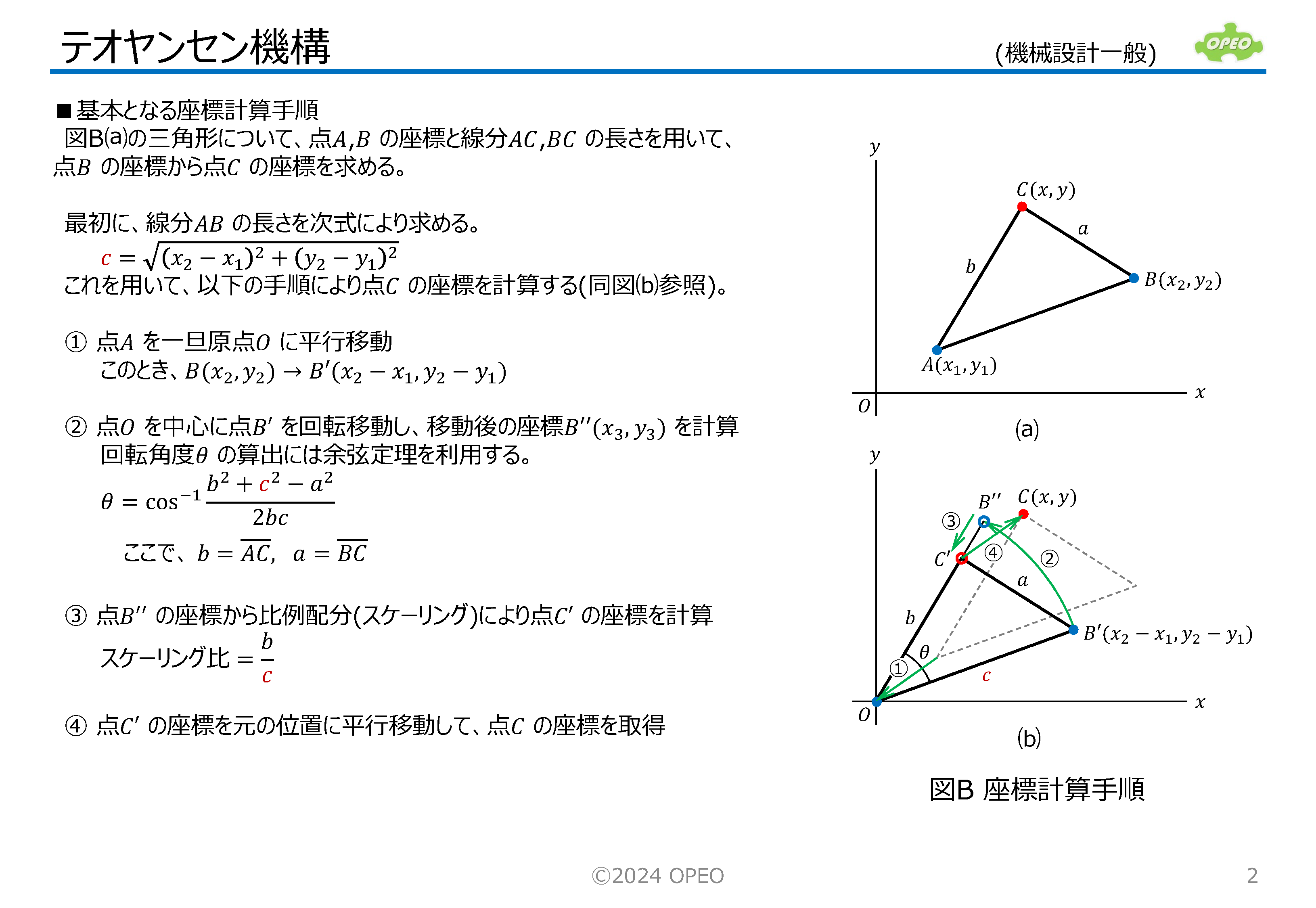
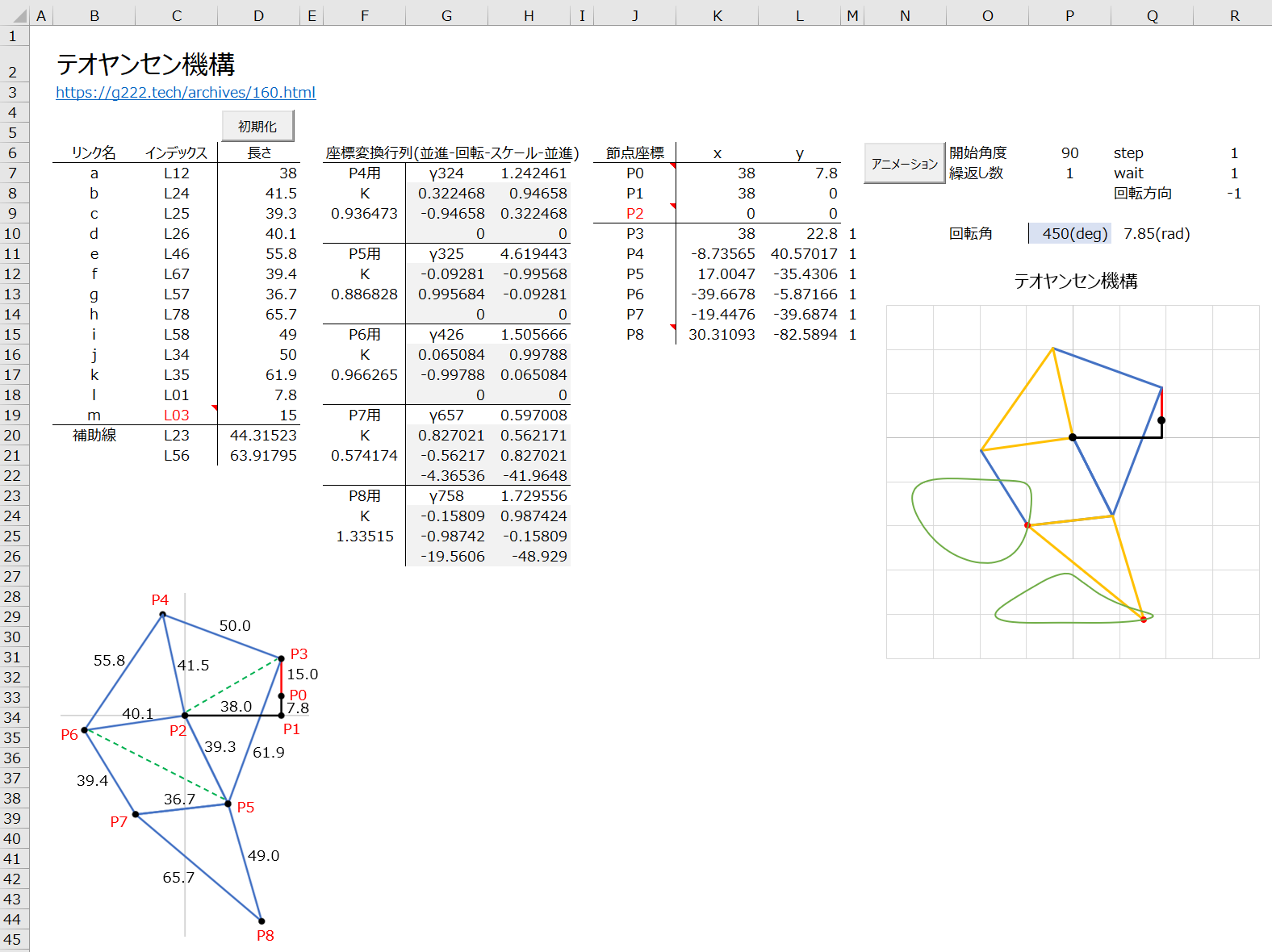
テオヤンセン機構(Theo Jansen mechanism)は、リンク機構を応用した移動歩行メカニズムです。 11本の可動リンクと2本の固定リンクにより、先端部分に疑似直線運動を発生させます。 P0,P1,P2は固定点であるため、P2-P0が1本のリンクと考えれば、P2-P0-P3-P4-P2、P2-P0-P3-P5-P2 および P2-P5-P7-P6-P2の3つの4節リンクが作られていることがわかります。 この記事では、テオヤンセン機構をシミュレーションする上で必要となる、リンク節点の座標を計算する手順について解説しています。 このテオヤンセン機構を解説したYoutube動画も公開していますので、参考にしてみて下さい。 |
 |
<参考記事>
・Excelミニテクニック-応用-座標変換
<参考動画>
・OPEOミニセミナー35 Excelミニテクニックその7(テオヤンセン機構Excelの紹介)
<参考URL>
・テオヤンセン機構を描く
テオヤンセン機構Excel
テオヤンセン機構を、Excelでシミュレーションするサンプルファイルです。
記事で紹介した座標変換手順を使っています。
アニメーションボタンを押すと、テオヤンセン機構のリンク動作のアニメーションを実行します。
<更新履歴>
・revB:ActiveXに関するMicrosoftのポリシー変更に対応するため、マクロ実行ボタンの表示方法を変更しています。
2025.6.14 更新 (revA1→revB)
DL解除コード:a504