
逆インボリュート関数
10,928
|
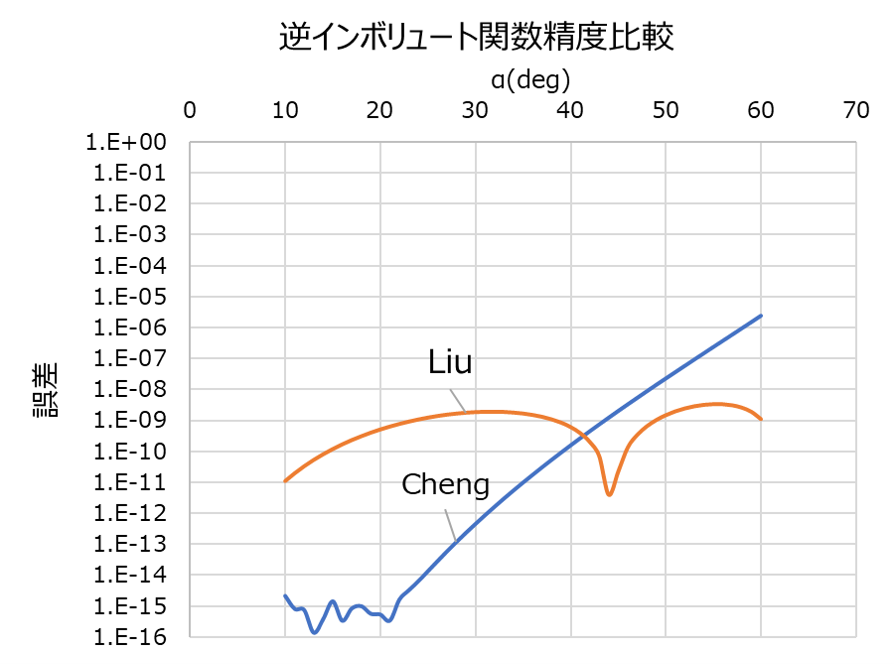
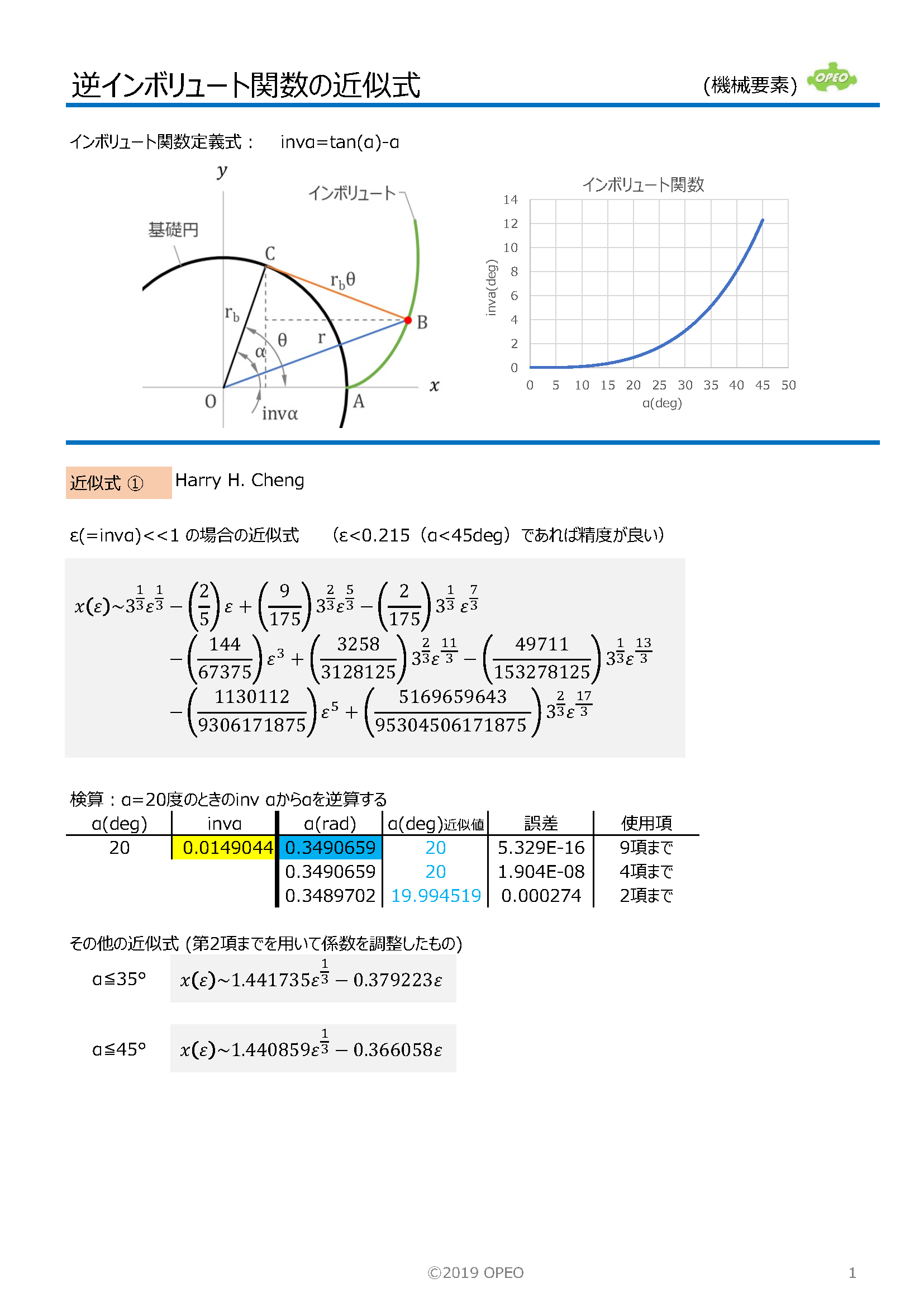
インボリュート関数(invα)は、右上図の角度αを用いて、次式で求められます。 invα = tan(α) – α 逆インボリュート関数は、invα の値から α を求めるものですが、これにはいわゆる解析解がありません。 一般的には、関数表の利用や、ニュートン・ラフソン法や二分法による近似計算方法が知られていますが、反復計算を伴わない、多項式による近似式も公開されています。 |
|
|
多項式によるものは、方式により誤差が異なりますが、実用的にはどれも十分利用可能です(右下図参照)。 なお逆インボリュート関数の値は、転位歯車のかみ合い圧力角の計算(最終的には転位歯車対の中心距離計算に使用)や正面かみ合い率、歯形係数の計算にも用いられます。 ユーザー定義関数(UDF)として使用できる、Excelのマクロファイルも添付します。 |
|

<参考文献>
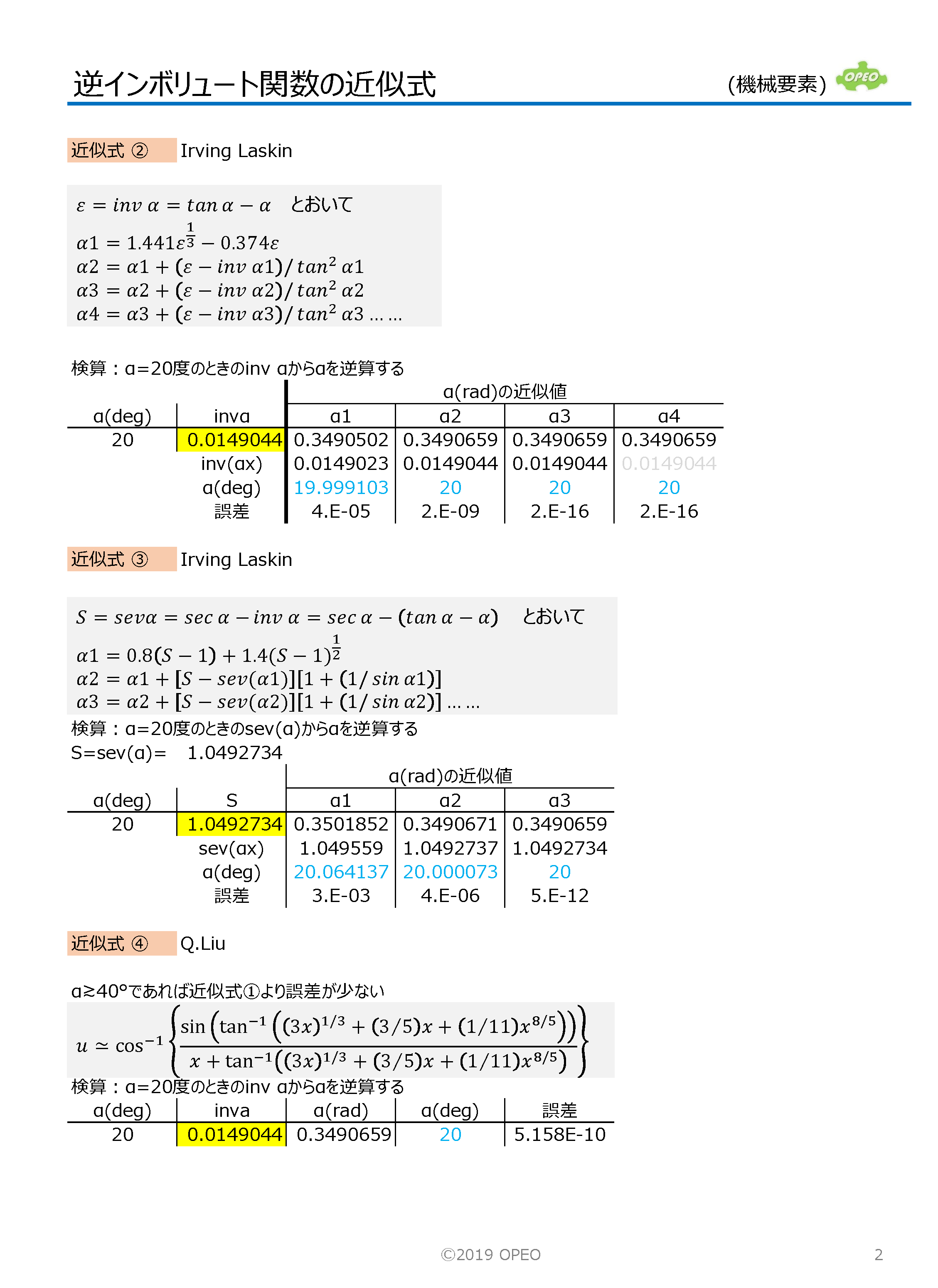
・Irving Laskin (1993), “Solving for the Inverse “Sevolute Function””
・Q.Liu (2017), “The Solution of Inverse Involute Function on Non-iterative Method and High Precision”, Journal of Yangzhou Polytechnic Institute, No. 2017(1)
逆インボリュート関数 Excelマクロ
上記で紹介した近似式の、Excelマクロのソースファイル(.bas)です。
関数名:calc_invinv(n, x, x0)
引数 n により、計算方法を切り替えます。
1:近似式① (Chengの式)
2:近似式④ (Liuの式)
3:ニュートン・ラフソン法 (最高精度)
引数 x に、インボリュート関数値をセットすると、逆インボリュート関数値を返します。
引数 x0 は、ニュートン・ラフソン法を適用時の初期値に使用します(省略可)。
Excelのマクロファイル(.xlsm)にインポートして使用して下さい。
<更新履歴>
・revC:関数に第3引数を追加しました。この引数は初期値用として準備してありますが、省略可能です。
2025.10.17 更新 (revB→revC)
DL解除コード:a402